






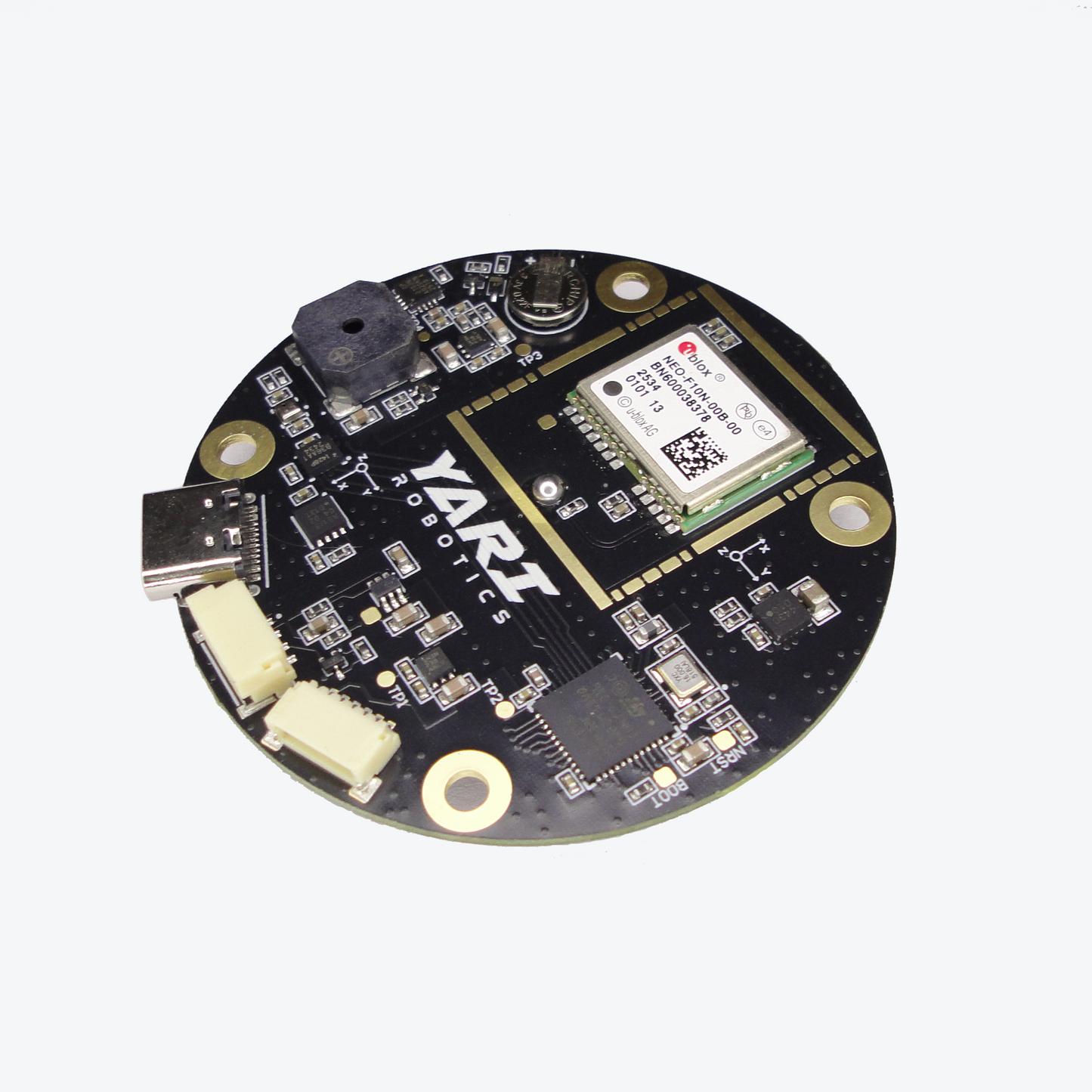
All-in-one positioning and navigation node for Pixhawk/ArduPilot systems. Combines a u-blox NEO-F10N standard precision multi-constellation dual band (L1+L5) GNSS with onboard magnetometer, barometer, IMU, safety switch, buzzer, and status LEDs over DroneCAN. Includes a USB-C connector for direct access to u-blox u-center software for configuration and logging. Suitable for UAVs, robotics, and mapping platforms where robust GNSS and rich onboard sensing are required.
Key Highlights
- GNSS receiver: Ublox NEO-F10N standard precision dual-band (L1 + L5) positioning with meter-level accuracy (up to 0.7 m), concurrent GPS, Galileo, BeiDou and NAVIC (IRNSS) - ensuring expanded coverage and higher reliability for users in India. Includes built-in anti-jamming/spoofing and RF interference mitigation.
- Antenna: Taoglas ceramic patch antenna, Optimized for L1 and L5 bands delivering reliable positioning accuracy in a compact 25 × 25 mm form factor.
- RF front end: The F10N’s internal RF chain uses an L1/L5 dual-band diplexer SAW filter, LNA, and second-stage SAW filtering, plus an LTE Band 13 notch filter on L1. This SAW–LNA–SAW architecture with built-in LTE suppression rejects out-of-band signals and boosts GNSS sensitivity without requiring external RF components.
- Integrated sensors: iSentek IST8310 magnetometer, InvenSense ICP-20100 barometer, InvenSense ICM-42688-P 6-axis IMU
- Open-source and flexible: runs ArduPilot peripheral firmware over DroneCAN for plug-and-play with Pixhawk and other DroneCAN-enabled flight controllers
- Safety and feedback: tactile safety switch, buzzer, and LEDs for safety, satellite fix, and system status
- USB-C port: Access u-center for quick configuration and data access
- Standard connectors: Pixhawk Standard CAN (4-pin JST-GH), Pixhawk Standard Debug (6-pin JST-SH), and USB-C
Technical Specifications
| Sensors and Processing | |
|---|---|
| GNSS Receiver | u-blox F10N |
| Antenna | Taoglas GVLB256.A |
| Magnetometer | iSentek IST8310 |
| Barometer | InvenSense ICP-20100 |
| IMU | InvenSense ICM-42688-P (6-axis) |
| MCU | STM32F412CEU6 |
| Indicators | Safety LED, GNSS Sat-Fix, RGB System Status |
| Built-ins | Safety switch and buzzer |
| Interfaces | |
| DroneCAN | 1× Pixhawk Standard CAN, 4-pin JST-GH |
| Debug | 1× Pixhawk Standard Debug, 6-pin JST-SH |
| USB | 1× USB-C for u-center configuration |
| Electrical and Environmental | |
| Supply Voltage | 5 V |
| Current | 110 mA average, 117 mA max |
| Operating Temperature | −25 to +85 °C |
| Mechanical | |
| Dimensions | TBD |
| Weight | TBD |
| Other | |
| Country of Origin | India 🇮🇳 |
GNSS performance and bands
| Accuracy (best) | up to 0.7 m |
| Horizontal accuracy | 2.0 m |
| Speed accuracy | 0.05 m/s |
| Navigation update rate | up to 25 Hz |
| Acquisition | Cold start 24 s; hot start 2 s; aided start 2 s |
| Satellites (max) | 22+ |
| Sensitivity | Tracking/navigation −167 dBm; cold/hot start −148 dBm; reacquisition −160 dBm |
| Frequency bands | GPS: L1 C/A + L5 Galileo: E1 B/C + E5a BeiDou: B1C + B2a NavIC: L5 |
Package includes
- 1× YARI GNSS module
- 1× 4-pin Pixhawk Standard CAN cable
- 1× GNSS module stand